双重水印攻击实验
需要得到的实验结果
- 需要使用统一的数据集
- 分别对于水印模型微调前、后执行:
- 二次编码后,信息解码比特错误率(BER,二次解码信息与一次编码信息的差距)
- 二次编码后,图像的 PSNR、SSIM 变化,如果方便的话,最好加上 LPIPS 变化
- 一次编码时的图像、二次编码时的图像、一次编码的信号残差、二次编码时的信号残差
计划实验的模型
- SepMark。向图像中注入的水印可以供两个不同鲁棒性程度的解码器解码(Tracer 解码出完整水印验证来源,Detector 验证图像是否被篡改)。只针对 Detector 即可。
备注
- AdvMark 并没有验证其方法对于模型的普遍性,只是验证了检测器的流通性。
- 冻结 encoder,只微调 decoder,这样就可以测试不同水印模型之间的流通性。
- 用非入侵式的方法来增加微调模块。新建一个 fine_tuning 文件夹,用继承的方式修改需要重写的方法。尽量把所有的东西都放到该 fine_tuning 文件夹中(除了跑通原模型所必要的数据集之类的)。这里需要注意 Python 包导入的问题,在 fine_tuning 文件夹中导入原模型的包因使用绝对导入,导入 fine_tuning 文件夹的内容则使用直接导入
SepMark
实验目的
本次实验需验证三点:
- 双重水印攻击是有效的。即对于同一张图片,第二次编码将使得第一次编码的信息消失;
- 提出 Loss 约束在全量微调下是有效的。即能够解决双重水印攻击;
- 部分微调是可行的。或者说仅针对解码器微调、而不进行全量微调是可行的;
实验结果
无微调/微调对比(Epoch 100)
| g_loss | error_rate_C | error_rate_R | error_rate_F | psnr | ssim | g_loss_on_discriminator | g_loss_on_encoder_MSE | g_loss_on_encoder_LPIPS | g_loss_on_decoder_C | g_loss_on_decoder_R | g_loss_on_decoder_F | d_loss | g_loss_on_double_watermark | double_error_rate_C | double_error_rate_R | double_error_rate_F | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 未微调 | 1.1644 | 0.00691318 | 0.000124139 | 0.478008 | 38.7788 | 0.938527 | 2.03329 | 0.000531517 | 0.00808962 | 0.000523669 | 0.000302436 | 1.08015e-06 | 2.00961 | 0.114804 | 0.498312 | 0.500698 | 0.487456 |
| 微调 | 0.0316224 | 0.00481385 | 6.89663e-05 | 0.485183 | 38.3354 | 0.929688 | 2.12371 | 0.000589209 | 0.00874837 | 0.000439849 | 0.000251798 | 5.70558e-07 | 1.95333 | 0.00159519 | 0.00129381 | 0 | 0.493148 |
上表足以说明:
- 双重攻击确实有效
- 提出 Loss 约束在全量微调下是有效的
实验过程
在 network/Dual_Mark.py 的第 200 行左右,添加如下损失行:
1
2
3
4
5
6
7
8
# ======================= Double watermarking ====================== #
double_message = torch.Tensor(np.random.choice([-1.0, 1.0], (images.shape[0], 128))).to('cuda')
double_encoded_images, double_noised_images, double_decoded_messages_C, double_decoded_messages_R, double_decoded_messages_F = self.encoder_decoder(encoded_images, double_message, masks)
g_loss_on_double_watermark = (
self.criterion_MSE(double_encoded_images, encoded_images) +
self.criterion_MSE(double_decoded_messages_C, decoded_messages_C)*5 +
self.criterion_MSE(double_decoded_messages_R, decoded_messages_R) +
self.criterion_MSE(double_decoded_messages_F, decoded_messages_F)
添加 Loss 后,从 Epoch 91 (包含 Epoch 91)训练至 Epoch 100。在测试集上 error_rate_C 依然在 50% 附近,这说明该 Loss 似乎没有作用(后发现实际上是因为测试代码有问题,且未找出测试代码出问题的原因。实际上,不管是不是由于测试代码有问题,这里的 Loss 这么写都是不合适的,应当先按照下面的方式重新写 Loss)。
猜测失败原因:约束第一次解码信息和第二次解码信息相同,但第一次解码信息本身又不一定准确。
解决方案:约束第一次 编码 信息和第二次解码信息相同,同时赋予权重。把添加的 Loss 修改为:
1
2
3
4
5
6
7
8
double_message = torch.Tensor(np.random.choice([-1.0, 1.0], (images.shape[0], 128))).to('cuda')
double_encoded_images, double_noised_images, double_decoded_messages_C, double_decoded_messages_R, double_decoded_messages_F = self.encoder_decoder(encoded_images, double_message, masks)
g_loss_on_double_watermark = (
self.criterion_MSE(double_encoded_images, encoded_images) +
self.criterion_MSE(double_decoded_messages_C, messages)*5 +
self.criterion_MSE(double_decoded_messages_R, messages) +
self.criterion_MSE(double_decoded_messages_F, torch.zeros_like(messages))
)
训练结束后,修改 test_Dual_Mark.py 代码,使其编码两次水印,运行得到的 error_rate_C 依然很高(50% 左右浮动)。但是如果借助模型的 validation() 函数在测试集上运行,则结果正常:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
with tqdm(total=len(val_dataloader)) as pbar:
for step, (image, mask) in enumerate(val_dataloader, 1):
image = image.to(device)
message = torch.Tensor(np.random.choice([-message_range, message_range], (image.shape[0], message_length))).to(device)
result_origin, (images, encoded_images, noised_images) = network_origin.validation(image, message, mask)
result_double_watermark, (images, encoded_images, noised_images) = network_double_watermark.validation(image, message, mask)
for key in result_origin:
test_result_origin[key] += float(result_origin[key])
test_result_double_watermark[key] += float(result_double_watermark[key])
for key in result_origin:
test_result_origin[key] /= len(val_dataloader)
test_result_double_watermark[key] /= len(val_dataloader)
pd.DataFrame([test_result_origin, test_result_double_watermark], index=[0]).to_markdown("test_result.md")
猜测是 test_Dual_Mark.py 代码的问题,暂未找到原因。不过好在终于可以在测试集上检验微调效果。
现在发现是 tmd 第二次生成的 message 的 message_range 错了,没有使用配置中的值,而是当时凭借记忆写了一个值 1,其实应该是 0.1。
1
2
double_message = torch.Tensor(np.random.choice([-1.0, 1.0], (images.shape[0], 128))).to('cuda')
double_message = torch.Tensor(np.random.choice([-message_range, message_range], (images.shape[0], 128))).to('cuda')
经过对 MBRS 和 SepMark 的编码器冻结实验,结果如下:
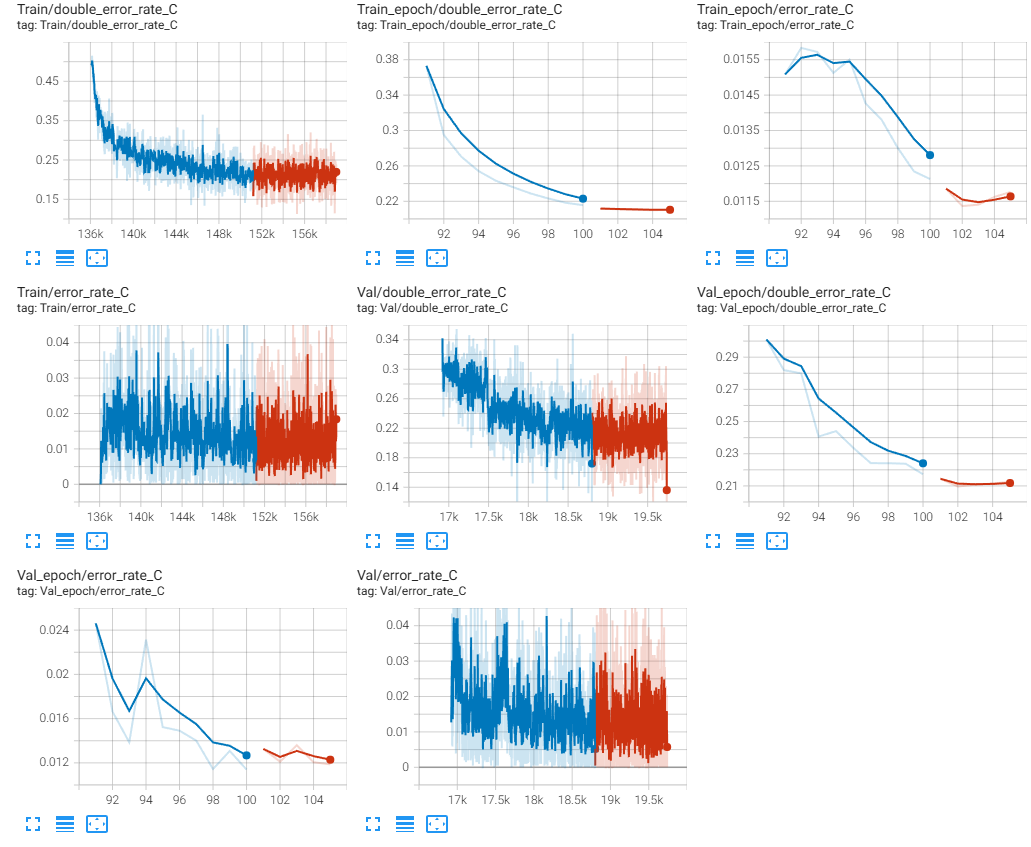
SepMark 冻结编码器,只微调解码器:
MBRS 冻结编码器,只微调解码器(有些 error_rate 数据有误,只看 double_error_rate 即可):
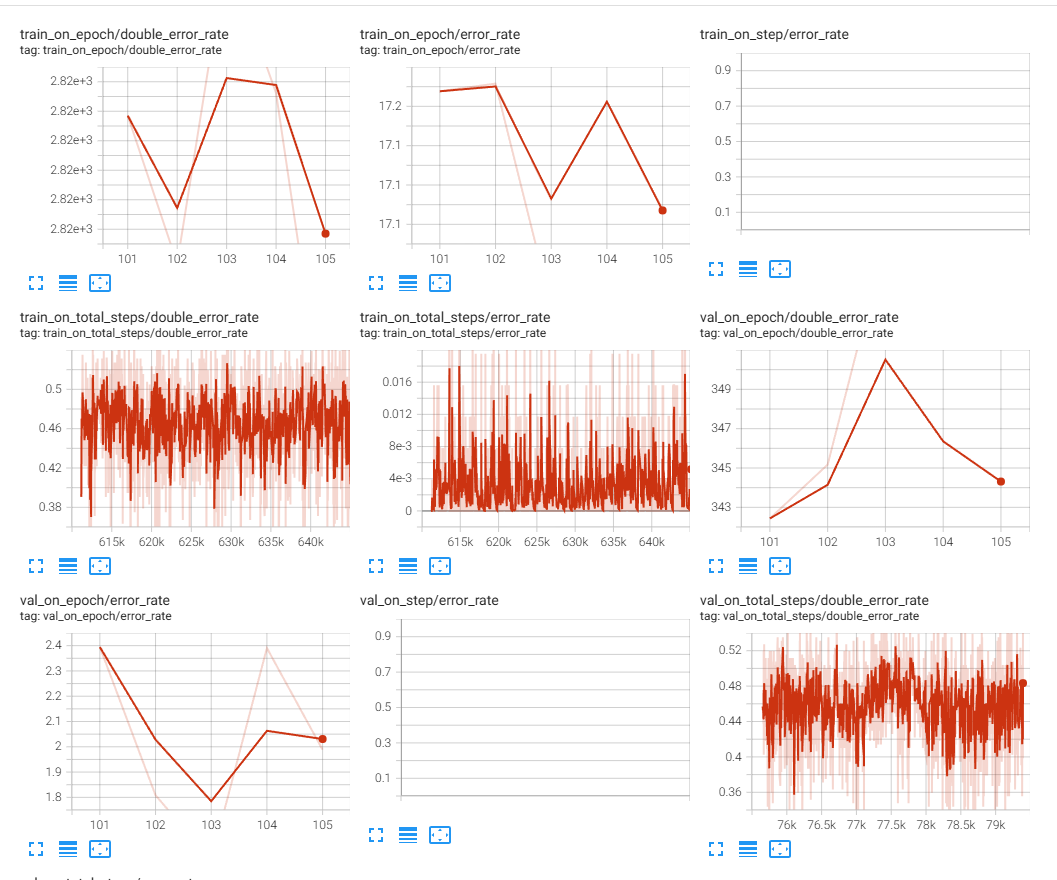
可以发现 SepMark 的双解码错误率虽有下降,但是最后在 10%~20% 之间趋于平缓;而 MBRS 的双解码错误率则完全没有下降。始终在随机猜测的概率(50%)处波动。
其实也容易想得通,双重编码时编码器已经破坏了原有的信息,无论再怎么训练解码器,也不可能恢复了。所以:
- 部分微调解码器是不可行的
但还没有尝试部分微调编码器,期望让编码器学习到只要图像中有水印,就无需再编码的规则。
又重新尝试冻结了解码器,微调编码器,结果如下:
但随着训练轮数的增加,双解码错误率始终没有降低到 1% 以下,训练损失也在逐渐增加。
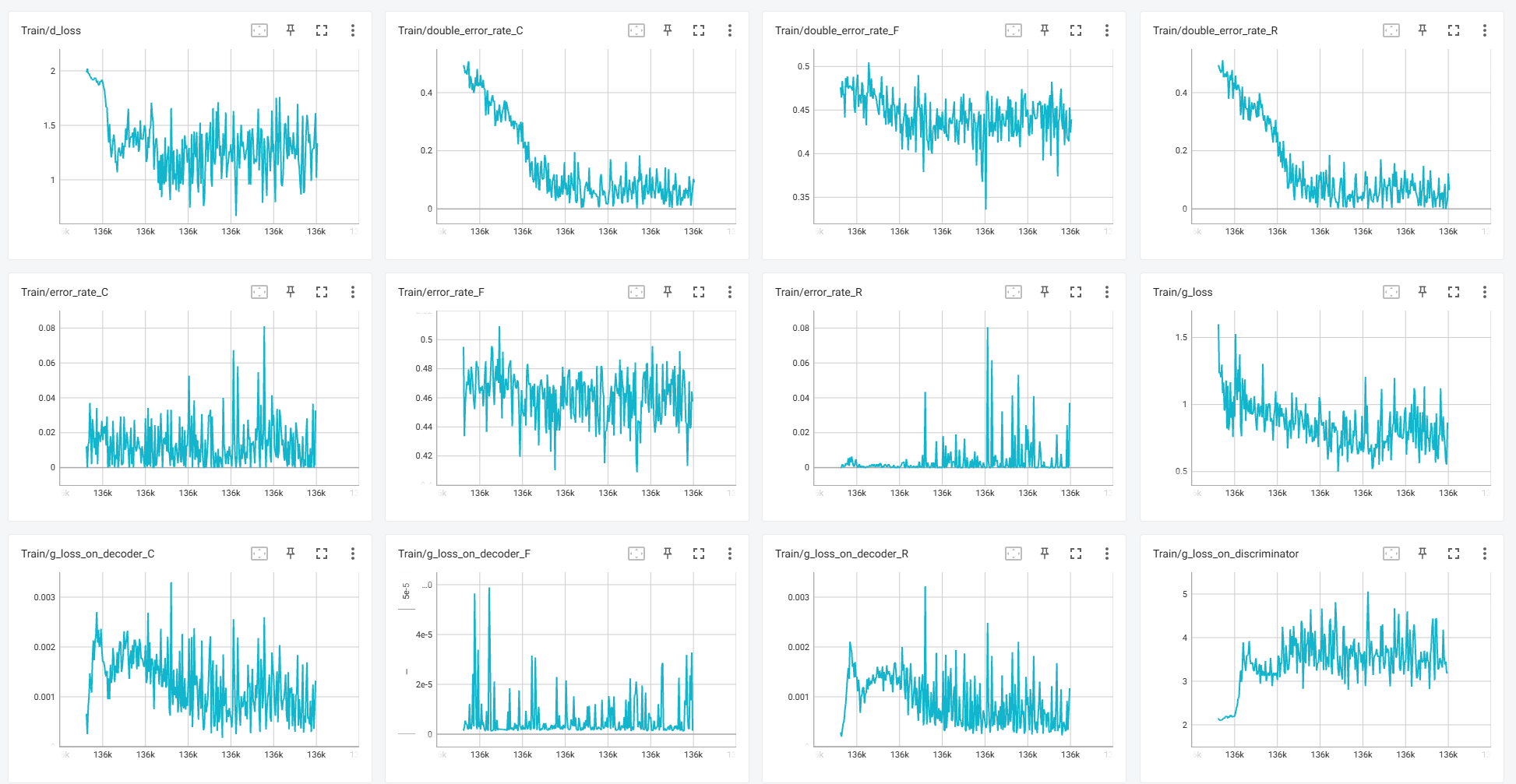
故又重新做了实验,仍然是使用全量微调,也是在有 噪声层 的情况下,使用了 warmup + 余弦退火 作为损失的 scheduler。
实验结果如下:
MBRS
实验目的
- 拿到微调前和微调后的 psnr、ssim、lpips、ber 数据
- 测试冻结编码器,只微调解码器是否可行
实验结果
- 测试冻结编码器,只微调解码器 不 可行
实验过程
可恶的作者没有提供预训练好的模型,只能在 SepMark 的数据集上自己重新训练。不过这次实验确定了要保留的实验数据,而像信号残差这种需要放图片的,由于不可能把所有的都放上去,所以最后肯定是放一两个就可以了,既然如此就到时候再说。